日本YASKAWA安川AC伺服驱动器特性
即使电机无法移动,也能推算转动惯量
“转动惯量比* ”是调整伺服增益的参考参数,需要设置。AC伺服驱动器Σ-X增强了估算其计算所需的“负载转动惯量”的功能,因此即使在运动部件密集且电机运行范围有限的情况下,电机也不会移动。可以进行估计。
∗ 转动惯量比:负载转动惯量与电机转动惯量的比率
任务:我想估算负载转动惯量,但在可动范围有限的情况下无法执行所需的操作。
负载转动惯量是根据机构各部分的重量和结构计算得出的,但由于机械结构复杂,难以准确计算。
为了估算负载转动惯量,需要不断地进行正向和反向运动。例如,在多个运动部件密集排列的机构中,移动一个电机会与另一个机构发生碰撞。因此,存在一个问题:电机不想移动。
在这种可移动范围受限的情况下(干扰),需要花费时间和精力来移动设备中的可移动部件以免干扰。
解决方案:Σ-X“频率指令测量”在不移动电机的情况下进行估计
AC伺服驱动器Σ-X改进了转动惯量估计算法,即使在可移动范围有限(干扰)的情况下,也可以在不移动电机的情况下估计负载转动惯量。您可以像以前一样减少避免设备中其他运动部件干扰的工作量。
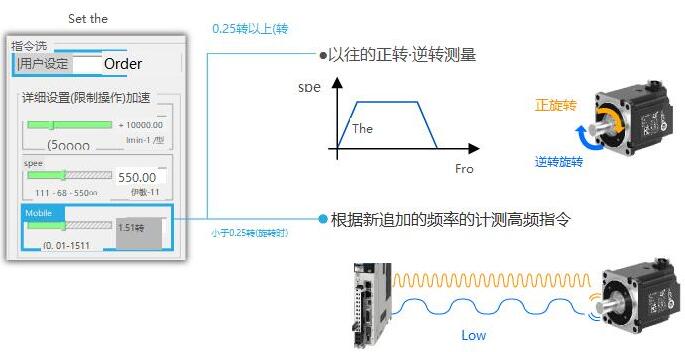
在 Σ-X 中,除了假设电机移动进行估计的传统“正向/反向测量”之外,如果在估计实现设置中将电机的移动距离设置为小于 0.25 转,则大部分电机将是您可以使用“按频率命令测量”来估计而不用移动。
如果每台电机都设置在某个值以下,它会自动切换到频率指令测量。
・旋转型:0.25 旋转
・DD 型:0.04 旋转
・直线型:2.5mm
 |





